UBOOT Navigator's intercept tool
Navigator's intercept tool
I made this tool to help the navigator calculate intercept courses. It relies on the fact that the UBoot travels at approximately twice the speed of the convoy (when surfaced) or the same speed (when submerged).
A pdf of the design can be downloaded here: UBOOT_intercept_tool.pdf
A pdf of the design can be downloaded here: UBOOT_intercept_tool.pdf
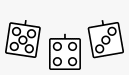
The tool consists of (working upwards from the lowermost part):
- A large grey absolute bearing ring, with north at the top.
- A white middle contact bearing ring.
- A black inner circle that indicates the contact's course.
- A cursor (clear plastic)
Example 1
U123 is on the surface.
"Contact! Obersteuerman! We are heading 320°. Contact is bearing 100° to us. It is heading 120° true. What is the intercept course? Schnell!"
"Contact! Obersteuerman! We are heading 320°. Contact is bearing 100° to us. It is heading 120° true. What is the intercept course? Schnell!"
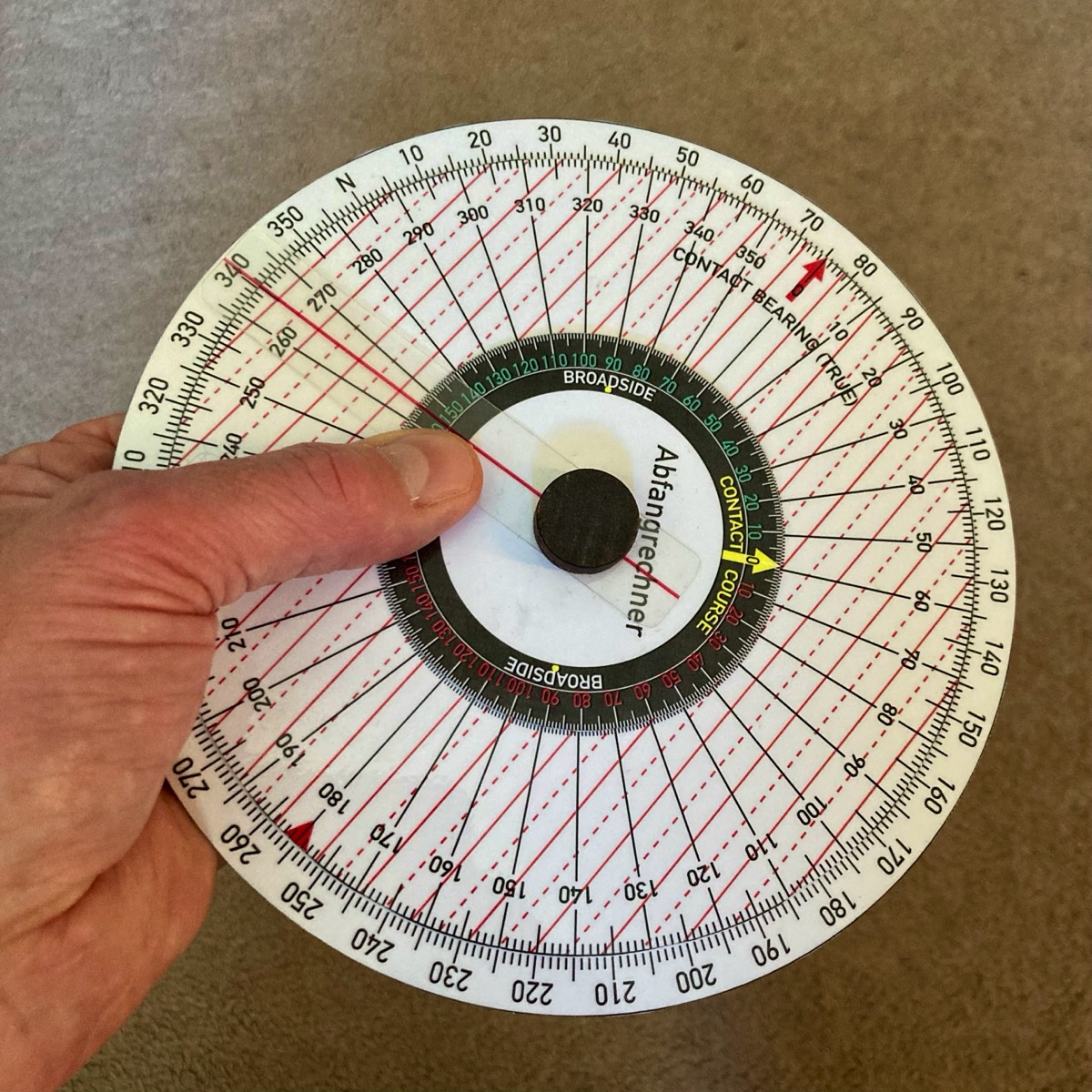
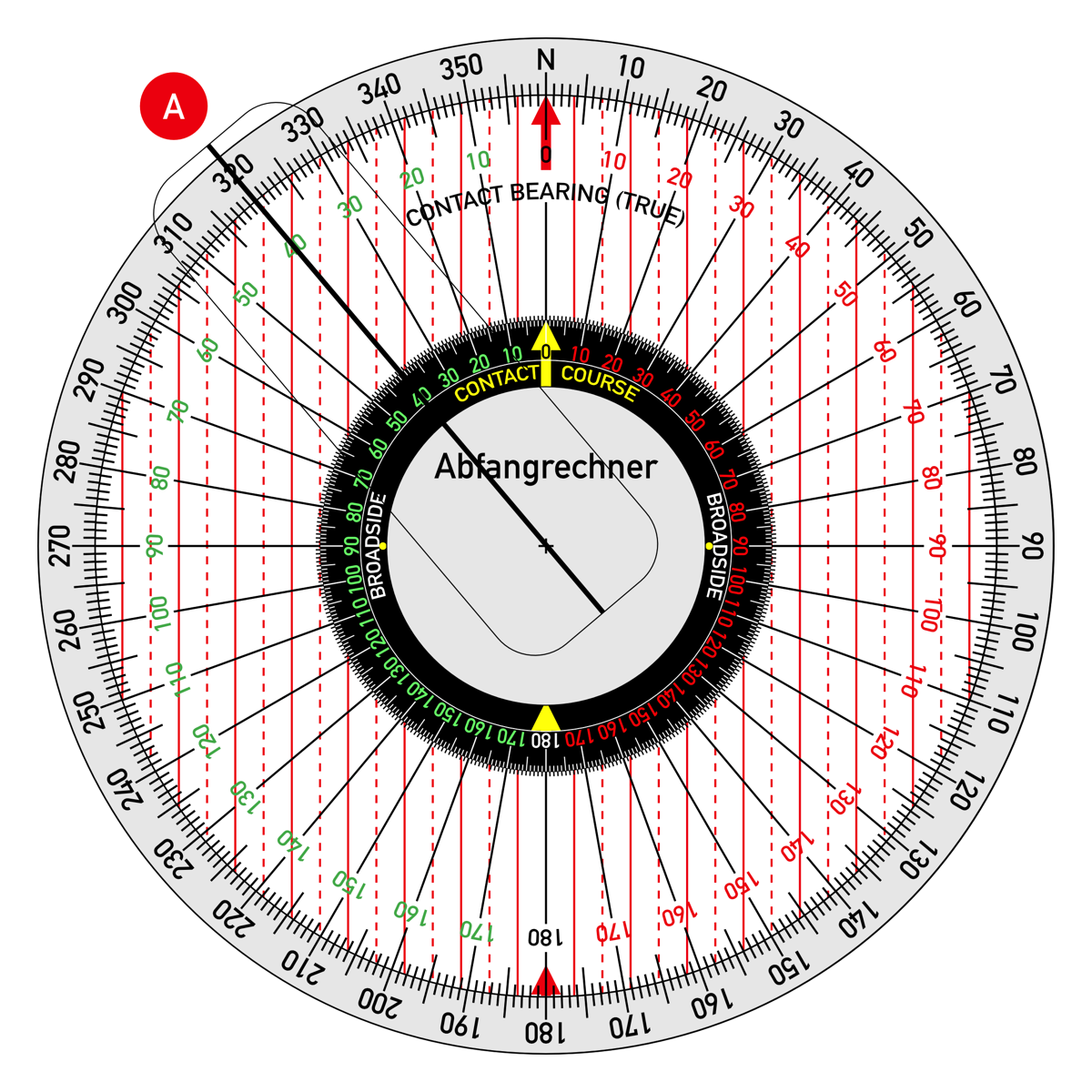
A: Set the cursor to the UBoot's heading on the outer grey ring.
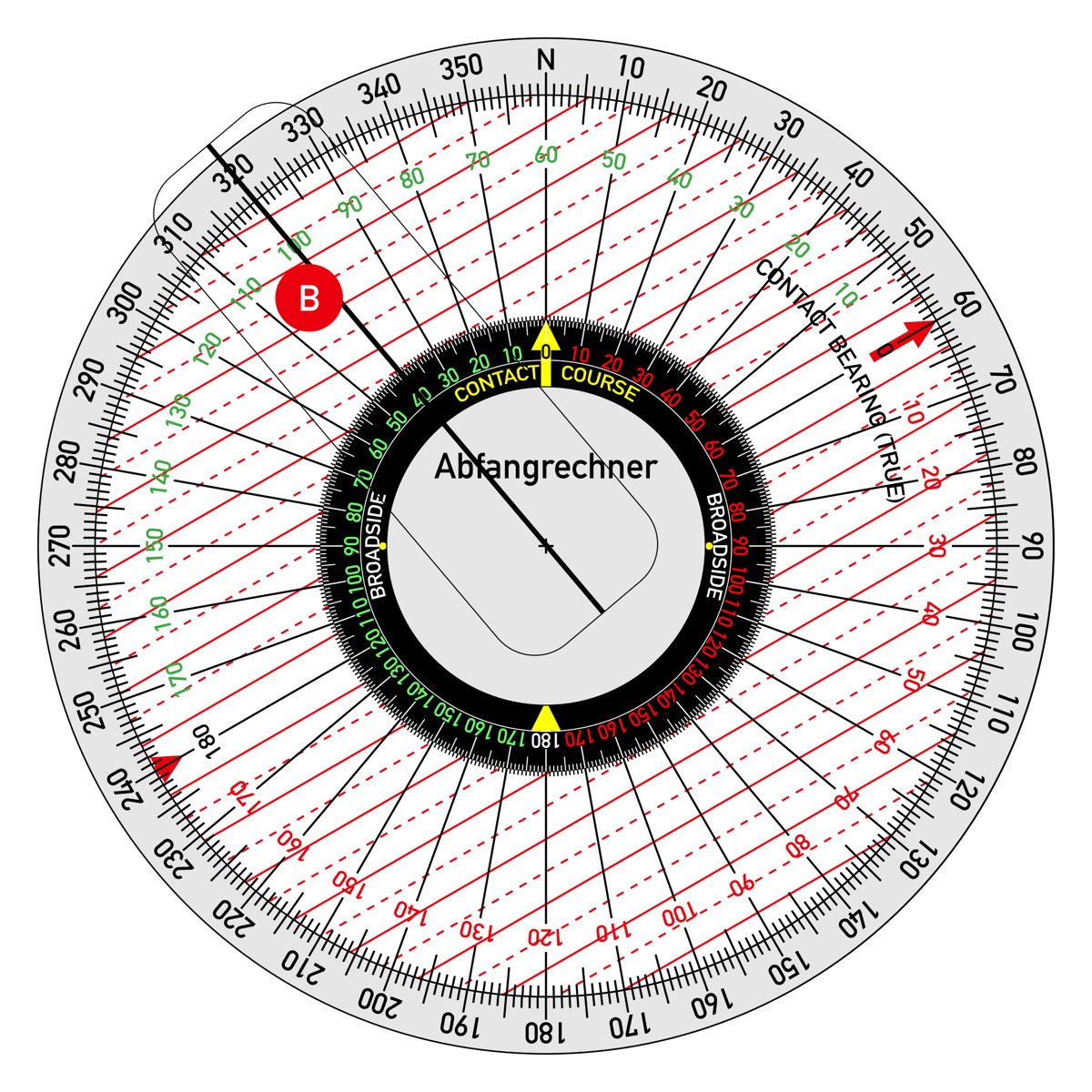
B. Rotate the white middle ring so that the contact's bearing is under the cursor, against the UBoot's heading.
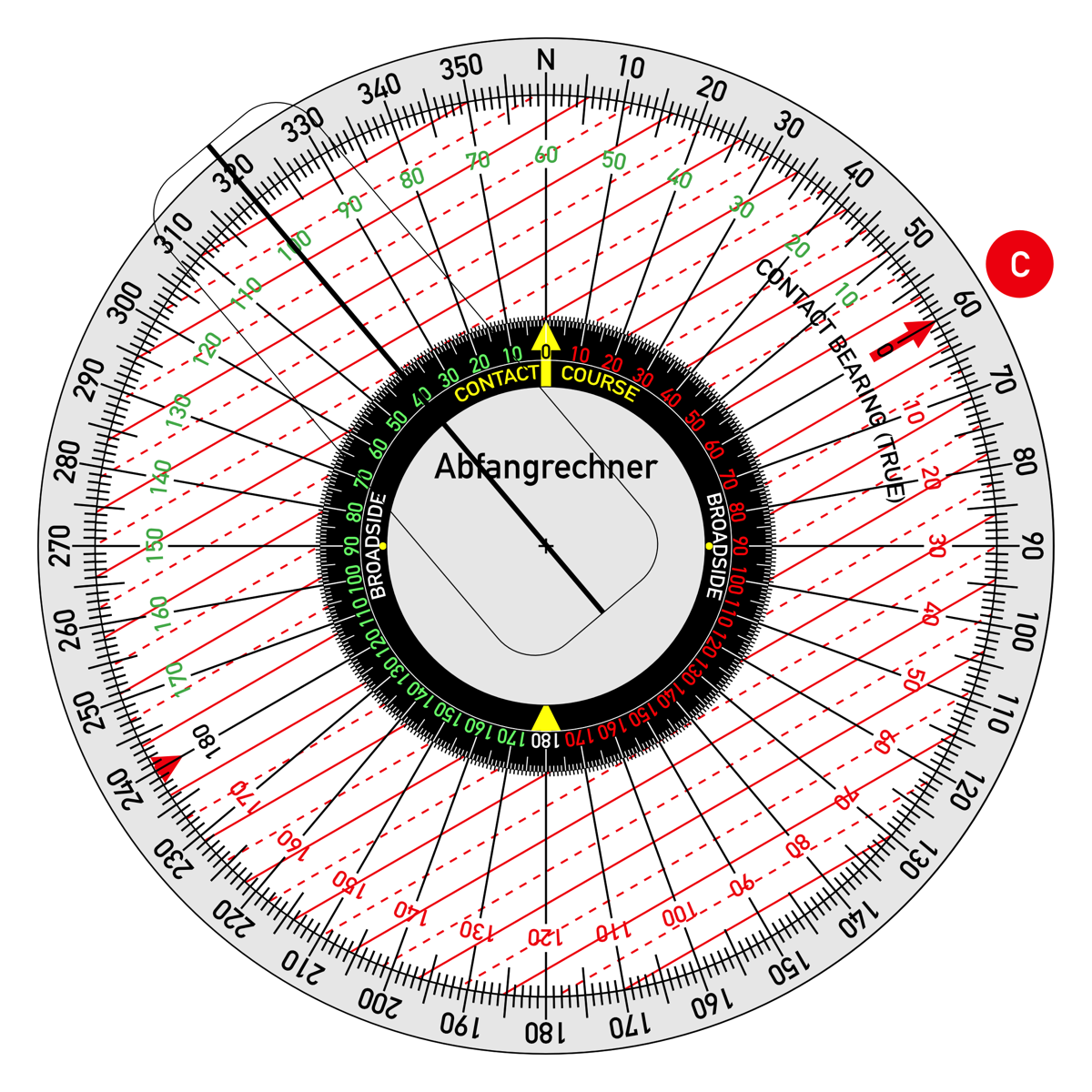
C. Read off the contact's true bearing, 60°.
(Mental check…we are heading 320°. Target is 100° to starboard. Its heading will be 320° + 100° = 420°. Take off 360° to give 60°. Alles gut!)
(Mental check…we are heading 320°. Target is 100° to starboard. Its heading will be 320° + 100° = 420°. Take off 360° to give 60°. Alles gut!)
D. Rotate the inner black circle so that the yellow arrow (the contact's course) points towards its true heading on the outer grey ring (120°).
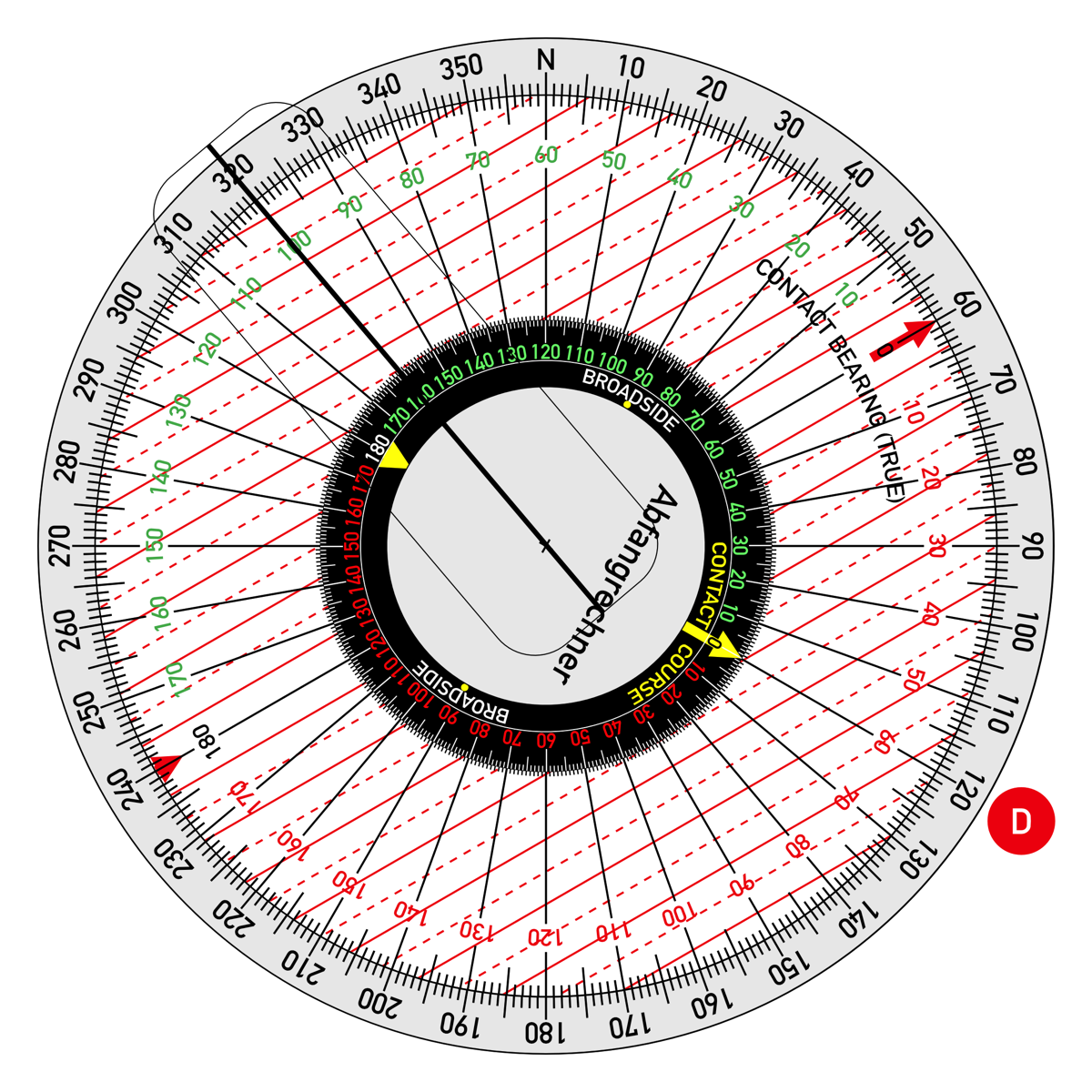
E. Look for the red line (continuous or dotted) at the tip of the yellow arrow.
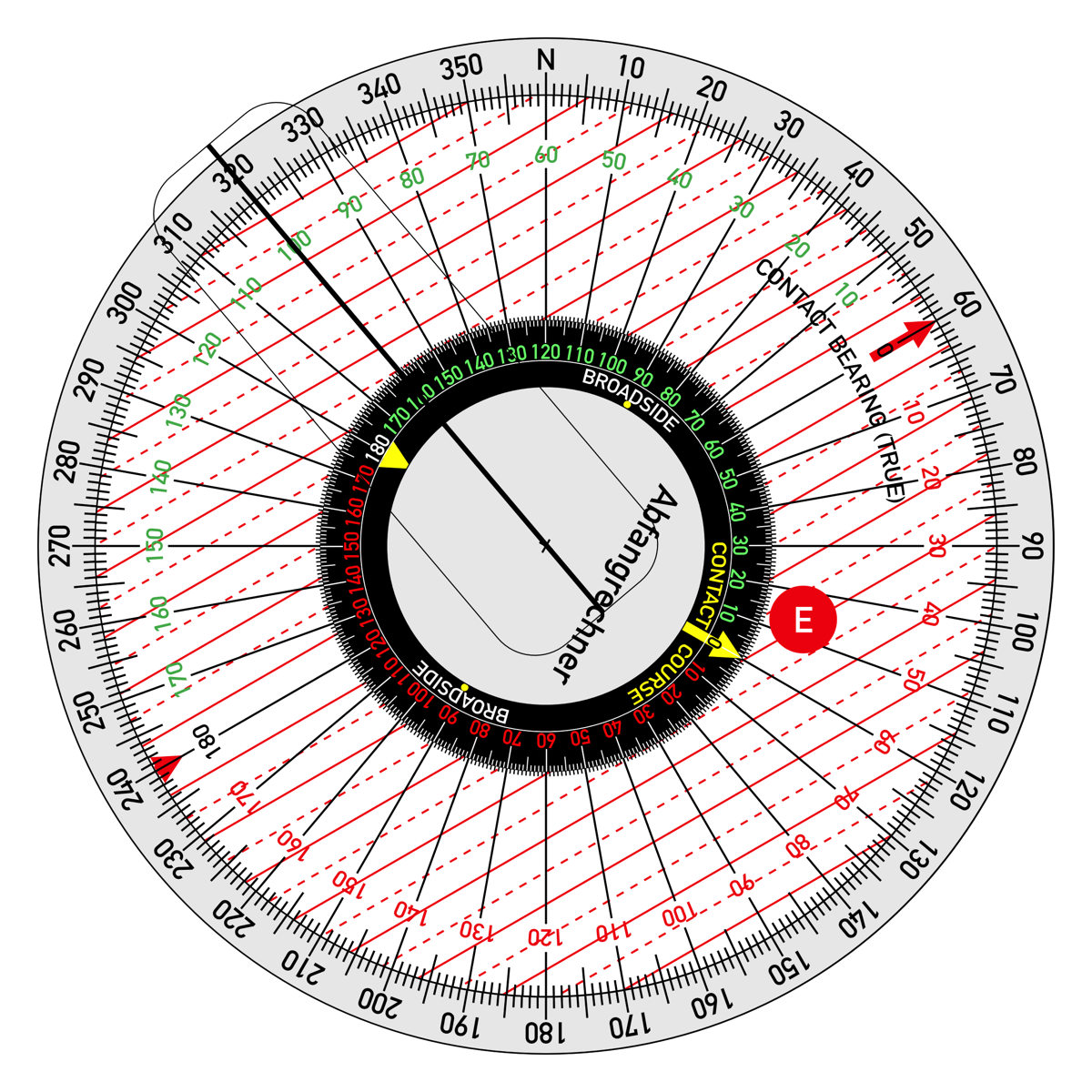
F. Follow the red line out to the grey circle and read off the heading for the intercept. 86°.
"Kaleun. Come starboard to heading 86°"
"Kaleun. Come starboard to heading 86°"
Example 2
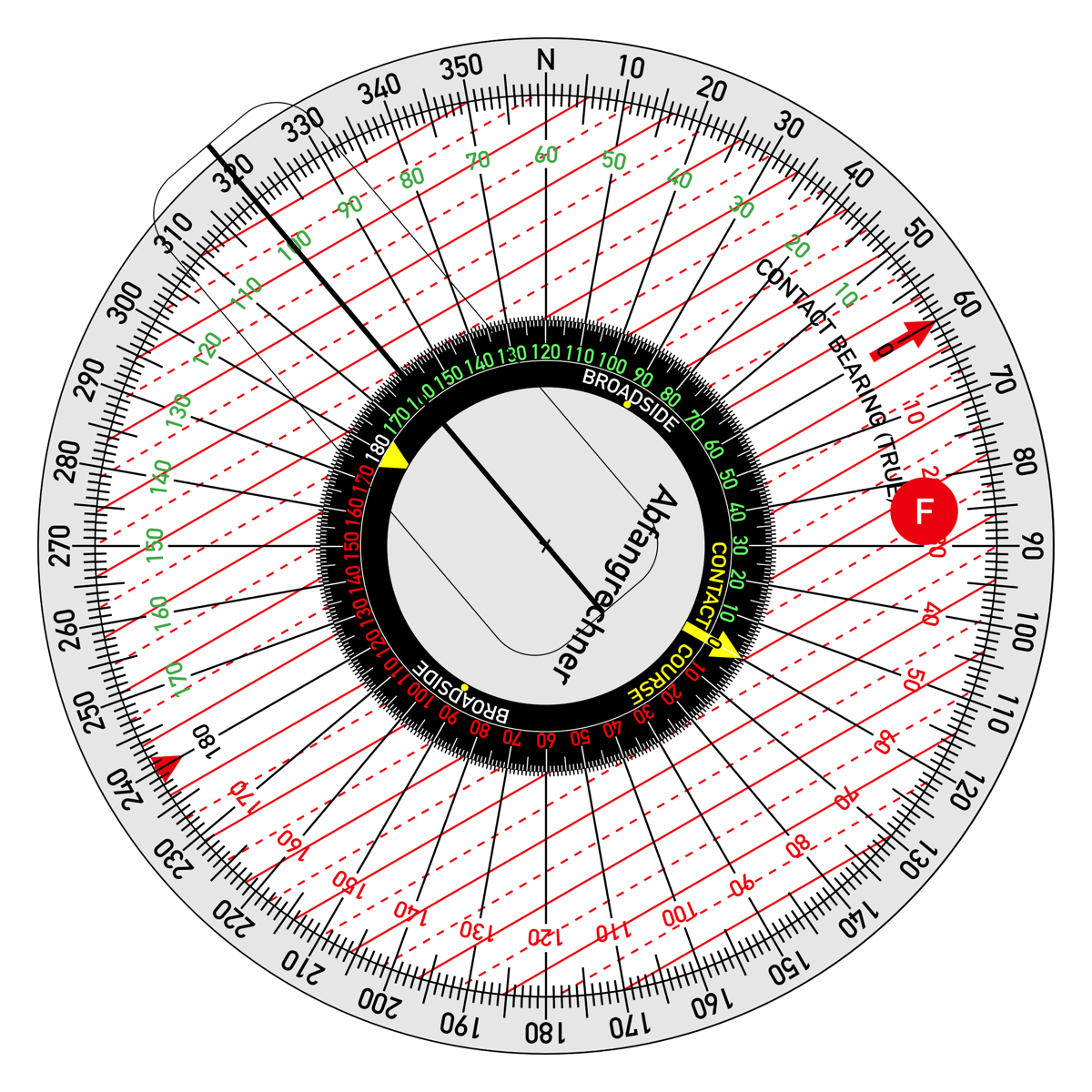
U123 is on the surface, heading 320°. Contact is bearing 100° to us. It is heading 190° true. What is the intercept course?
The only thing that has changed is the contact's heading. Change the inner black ring to reflect this.
In this case follow the dotted red line from the head of the yellow arrow right under the black inner ring, to read off the bearing of 82°.
The only thing that has changed is the contact's heading. Change the inner black ring to reflect this.
In this case follow the dotted red line from the head of the yellow arrow right under the black inner ring, to read off the bearing of 82°.
Why/how does this all work?
The ratio of the speeds of the surfaced submarine and the convoy is 2:1.
The white circle is twice the radius of the black circle.
If the UBoot is intercepting the convoy, the convoy will always be at the same true bearing to it.
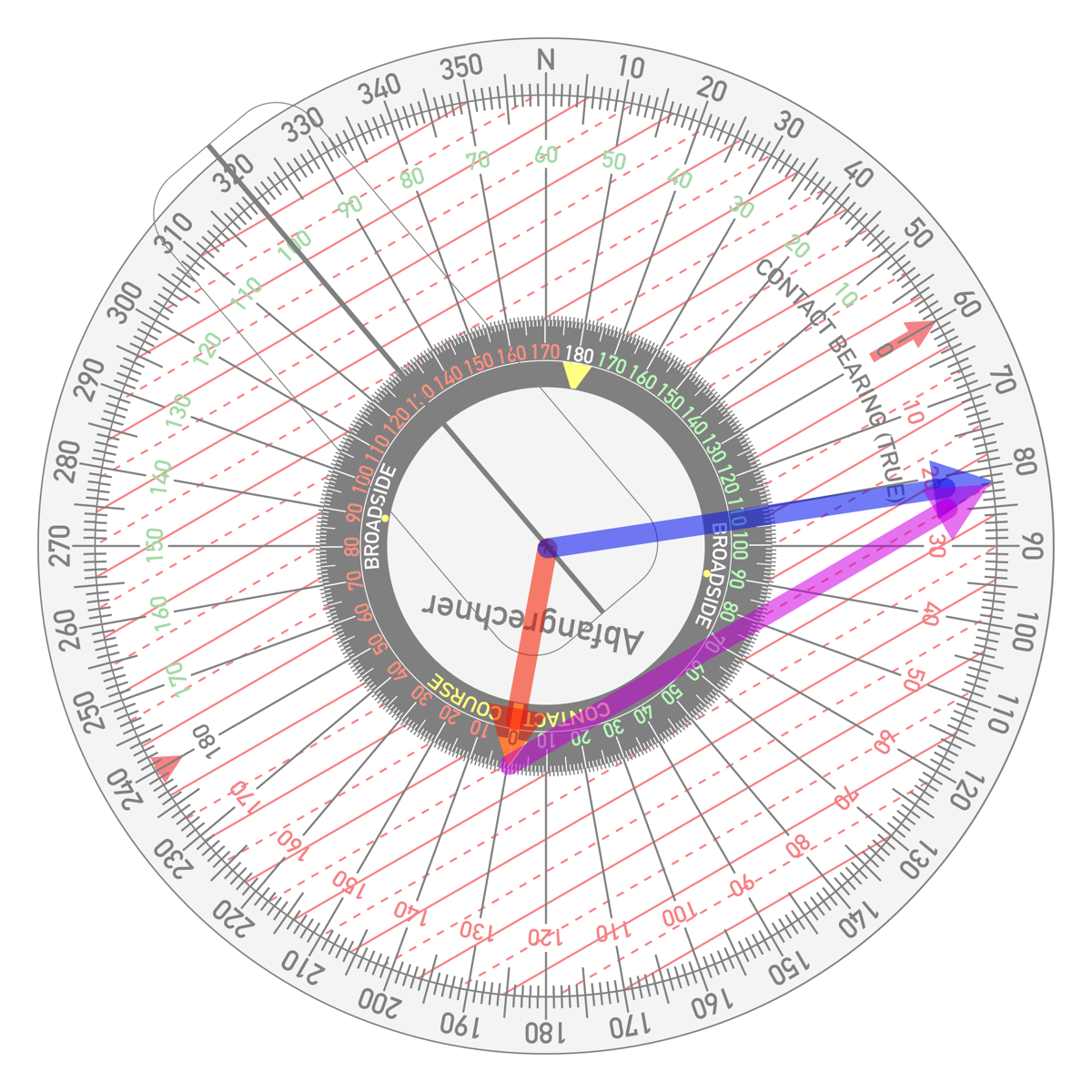
The red arrow is the convoy's vector.
The blue arrow is the submarine's vector.
The red line is the difference between the two, and points towards the convoy.
The white circle is twice the radius of the black circle.
If the UBoot is intercepting the convoy, the convoy will always be at the same true bearing to it.
The red arrow is the convoy's vector.
The blue arrow is the submarine's vector.
The red line is the difference between the two, and points towards the convoy.
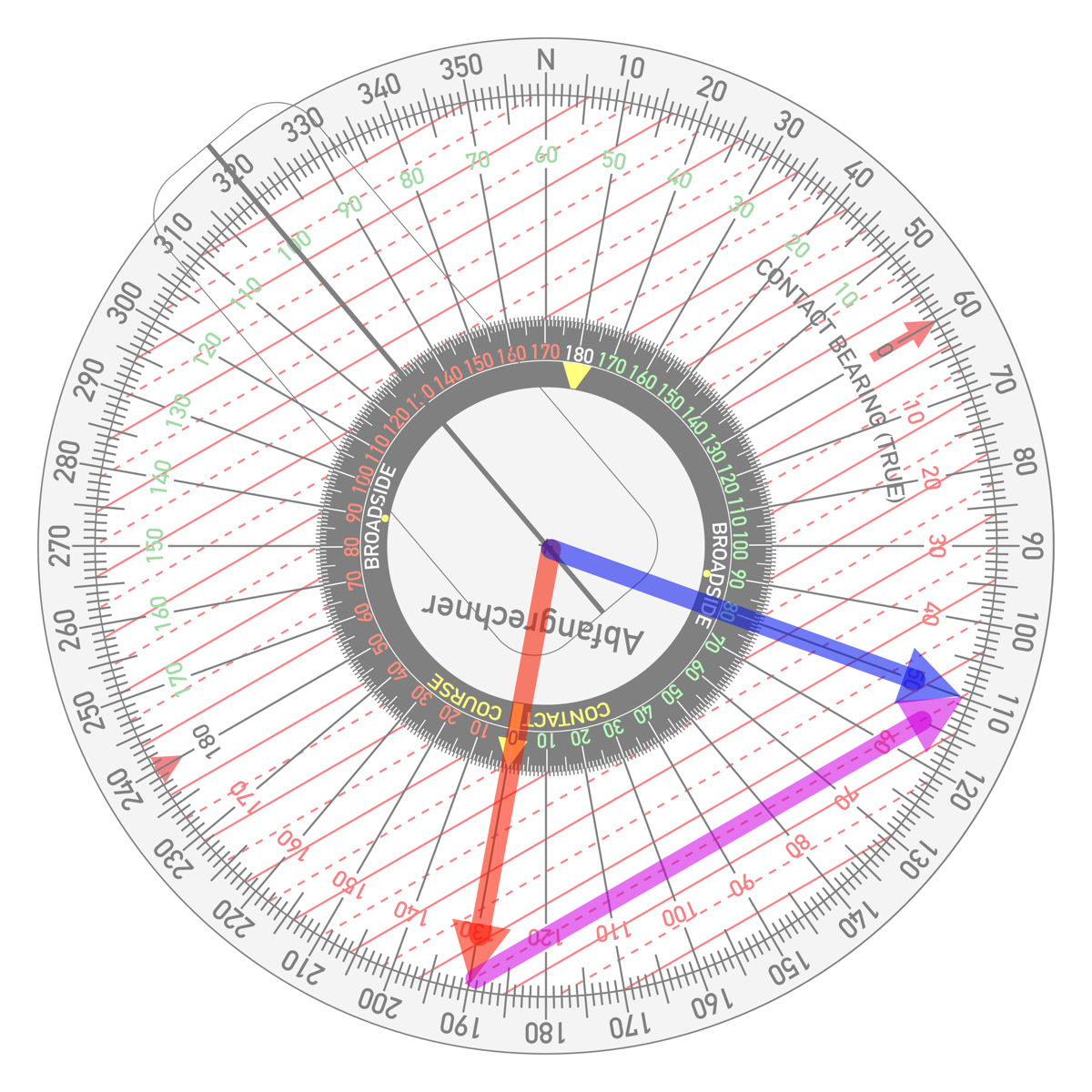
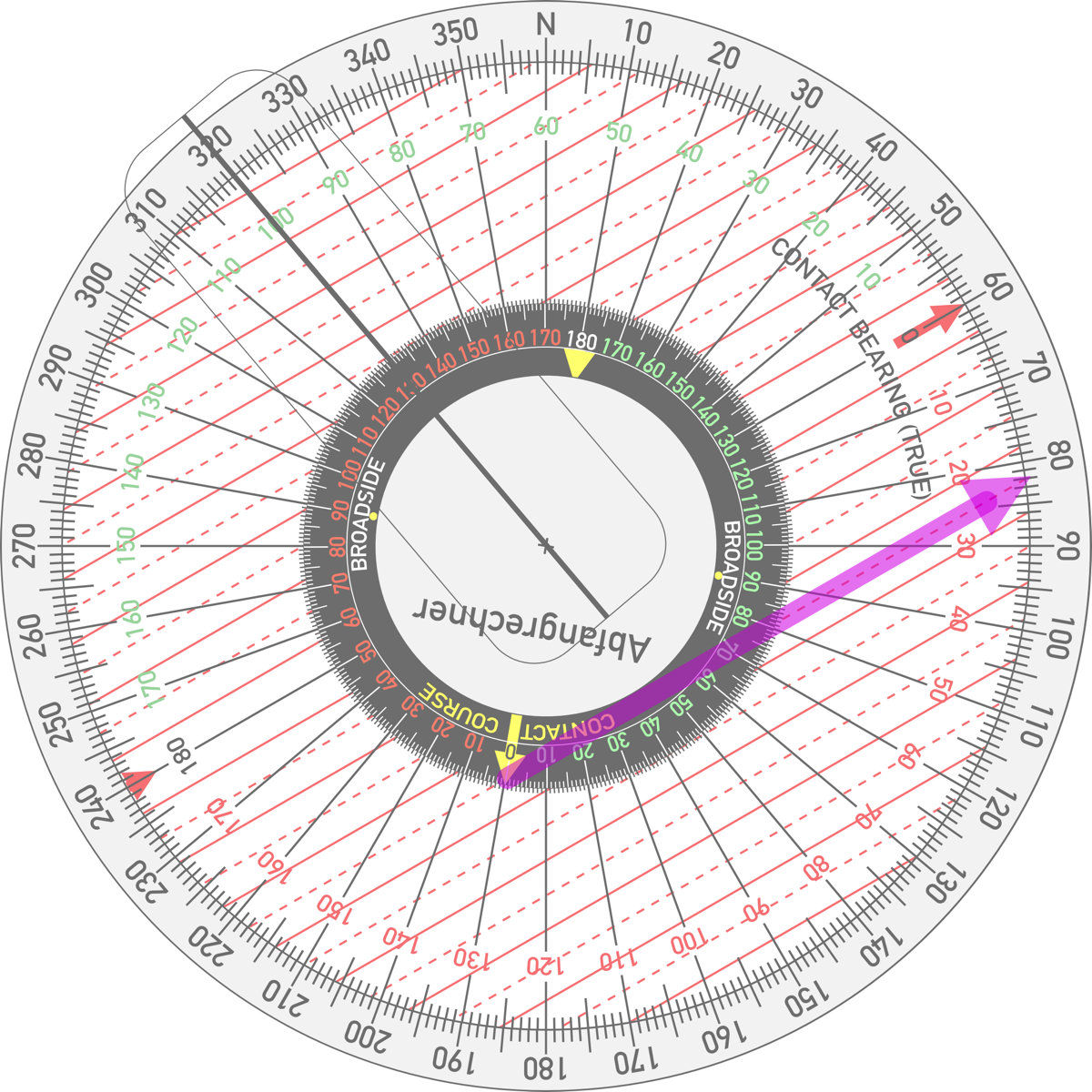
What if the UBoot is submerged?
If the UBoot is submerged, its speed is approximately the same as the convoy.
We use the tool as before, but as if the white and black circles were the same size.
It is most convenient to imagine the black circle is twice the size.
We set things up as before. But this time we follow the yellow arrow out to the outer edge of the white circle (orange arrow).
We then follow the red line across to the edge white circle (purple arrow).
As before the difference between the red and blue arrows points in the direction of the contact.
The UBoot needs to steer at 110°.
We use the tool as before, but as if the white and black circles were the same size.
It is most convenient to imagine the black circle is twice the size.
We set things up as before. But this time we follow the yellow arrow out to the outer edge of the white circle (orange arrow).
We then follow the red line across to the edge white circle (purple arrow).
As before the difference between the red and blue arrows points in the direction of the contact.
The UBoot needs to steer at 110°.